

15mc ve asada a2 ile yaptığım ucar makası iyileştirmeye calışıyorum.sistemin hız eğrisini ekledim.
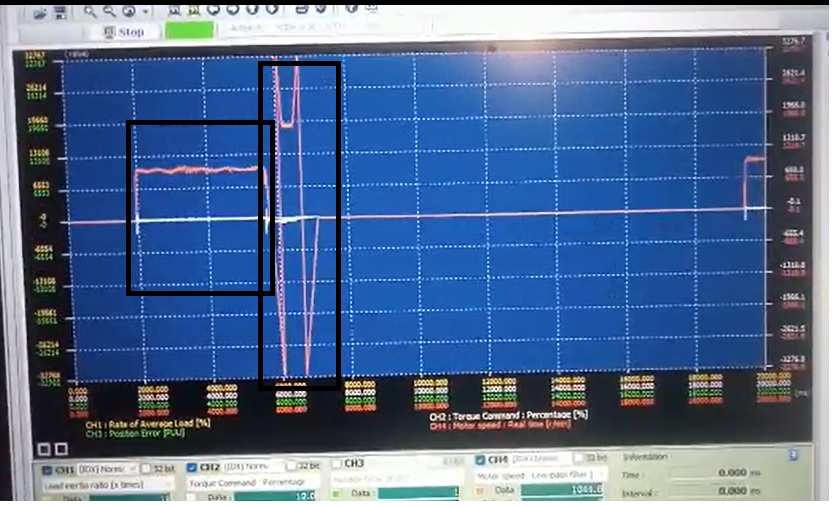
birinci kare master enkoderi yakalayıp senkron olduğu bölge.ikincisi ise absolute komutlarla geri geldi bölge.
1.senkron bölgesinde kalkışta ve duruşda rampayı tama olarak etki etmiyor.cam_in fonksiyonu kullanıyorum.sistem cok hızlı senkron olmaya calışıyor.rampayı kalkıs rampası ne kadar uzatsamda olmuyor.
2.master enkoderin belli bir hızından sonra sistem senkron olmuyor.cam_in fonksiyonu cıkış vermiyor.şu anki çalışma hızım senkron durumunda master enkodere göre 1000rpm .motorum 3000rpm.enkoder 5000puls
sistem sonkron olduğunda normal durumda 1000rpm gibi grafikten goruyorum.sistemi yavaş yavaş hızlandırdığımda 2500 rpm den sonra senkron olamıyor.hareketsiz bekliyor.bu durum neden olabilir.master enkoder puls lerini kaçırıyor olabilirmi?